

マイクロメカトロニクス
光MEMS、微細加工、センサ、マイクロアクチュエータ
安全やエネルギー効率を高める 機能性構造の加工とセンサデバイスの研究
研究背景
微細加工技術を駆使して、機能性構造やデバイスを創ります。ロボットなど、人と機械が肉薄する未来を見据えて、安全やエネルギー効率を高めることにデバイス面から取り組みます。機械部品を含む①立体サンプルへのフォトリソグラフィ加工、②MEMSセンサ?アクチュエータ、③マイクロプラズマなどに取り組んでいます。
立体へのフォトリソグラフィ加工技術
高性能LSIを工業的に成立させているフォトリソグラフィ技術は、微細な構造を多点同時に加工できる長所があるが、平面にしか有効でありません。機械(立体形状が機能を実現する部品、人の形に合わせる部品など)や光部品(レンズなど)には凹凸や曲面がどうしても必要です。これら立体サンプルにも微細加工を可能にし、ものづくり技術を極めて新機能創出に取り組みます。本研究は、株式会社アイセロと共同研究をしています。
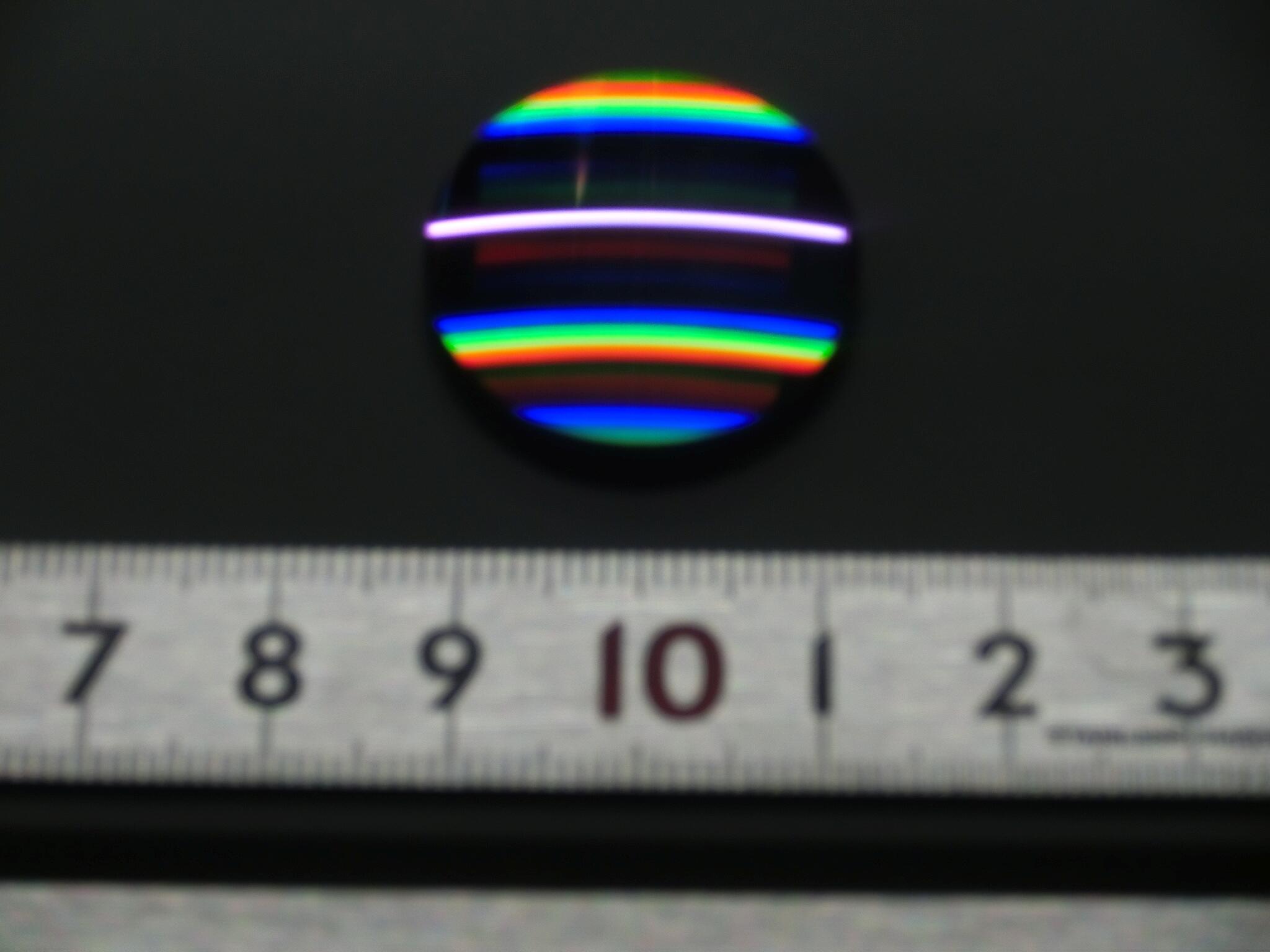
φ25mmレンズ曲面に一括形成したピッチ4μmの格子。天体観測で足彩胜负彩となる赤外線 レンズの高性能化
MEMSセンサ?アクチュエータ素子
一例を紹介すると、薄さ270nm(この極小サイズはウイルスと似た大きさ)の静電駆動ねじり振動子です。機械構造に工夫があり、ばね定数が大きな温度依存性を示し、常温動作する赤外線センサとして優れています。温度分布計測による機械や建物の異常検出、人が発する赤外線検出による見守り機能、ガス特有の赤外線吸収に基づく環境測定などに応用が広がります。
ねじり振動子が静電気で動く様子(長さ0.180mm、幅0.034mm)
マイクロプラズマ
誘導結合型大気圧プラズマ源の小型化と省電力化を実現しました。安価な車載無線用電源を利用して、高密度な大気圧プラズマが得られます。これを応用した真空紫外光源や、エッチングなどの高速加工、バイオサンプル処理などを手がけています。本研究分野で、名古屋大学 堀?石川研究室と共同研究をしています。

ガラス板表面のスズを還元できる高密度プラズマ
超音波推進力による水中ドローン
水中ロボットやドローンの駆動方式において、主にヒレやスクリューの実用例がありますが、機械的に大きく動く部分が存在し、微小化が難しいです。超音波振動子と液体の境界面の微小振動を推進力発生源とし、全く新しい液中推進源として、高周波化によりマイクロ化が容易であり、微小化しても単位面積当たりの推進力は低下せず、高推力の実現も可能です。多自由度水中ドローンやパイプ内ロボットなどの創成も目指しています。将来的に、遠隔操縦支援システムで広範な液中作業や調査などに威力を発揮することが期待されます。
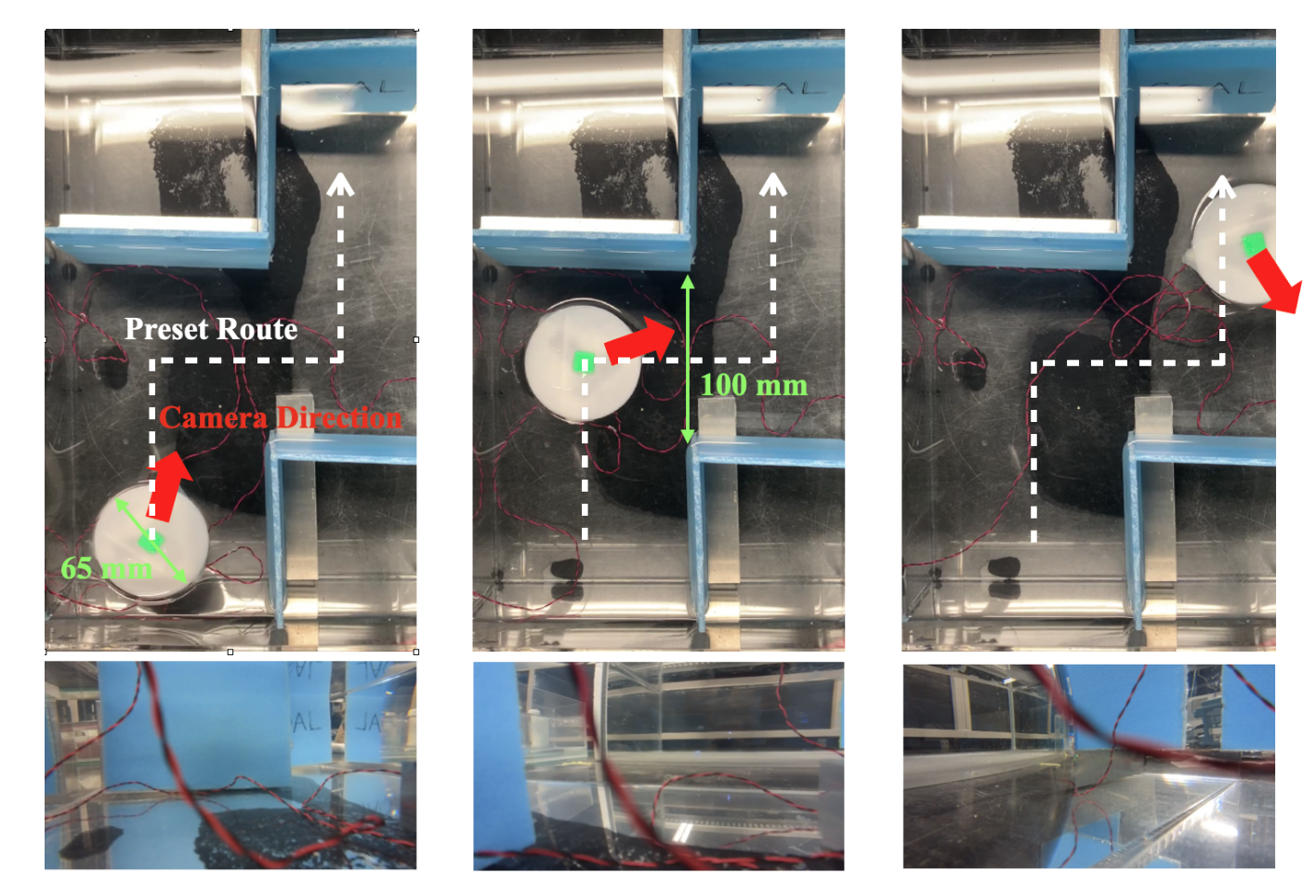
非鉛性ニオブ酸リチウム振動子による推進源を用いた多自由度水中ドローンの走行ルートと水中カメラ記録画面
非線形音響推進力による血管内手術支援ロボット
音響推進システムは、MHz帯の微小振動(nm)を用いた振動面後方に高水圧を発生されることで、推進力発生源として利用することで、単純な構造、高推力と小型化という利点があります。音響推進システムを用いた自走式ロボットは簡単な外部制御で高精度の移動が実現できます。既存の手動挿入式の代わりに、新型超音波推進システムによる血管内自走式ロボットを利用し、高精度で安全性が高い、身体に優しい血管外科手術法の創成が足彩胜负彩で、血管内治療施行が医師と患者に待望されています。
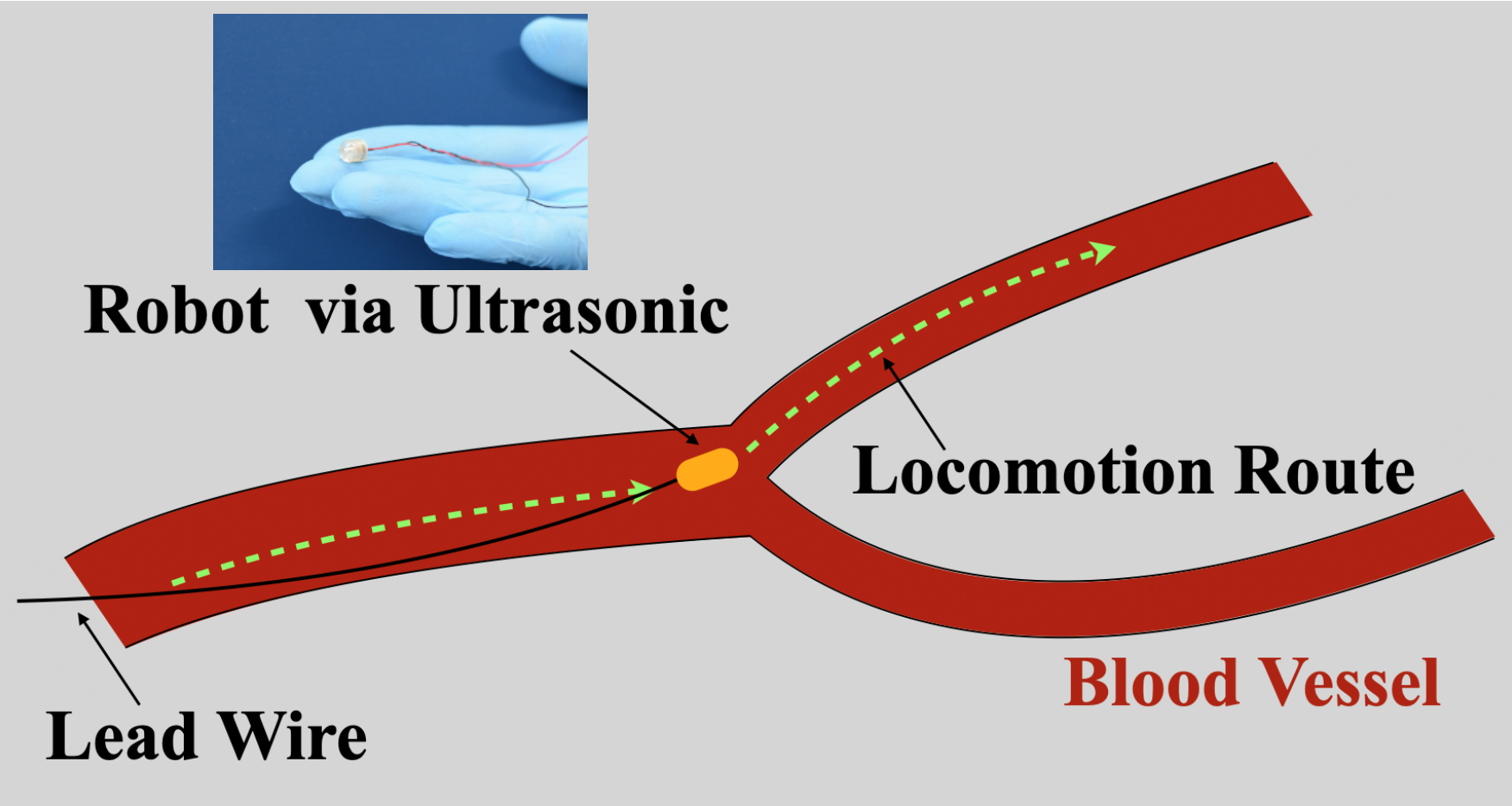
音響推進システムを用いた自走式血管内手術支援ロボット
MEMS加工による超音波素子を利用した医用デバイス
MEMS加工と音響?超音波技術を持ち、高周波数(MHz帯)超音波素子による医用デバイスの創成を目指しています。ナノメートル微小振動を効率よく励振するため、材料技術、音響?超音波技術とMEMS加工の工学の知見と学問を展開して、アクチュエーションを中心として、医用デバイスを検討します。例えば、超音波振動子のみで液体の搬送と霧化の二役を持ち、肺部投薬システム(Pulmonary Drug Delivery) 向けの新型ナノ粒子無圧式スプレーの創成が期待されます。
本研究は、公益財団法人JKAの機械振興補助事業として実施しています。
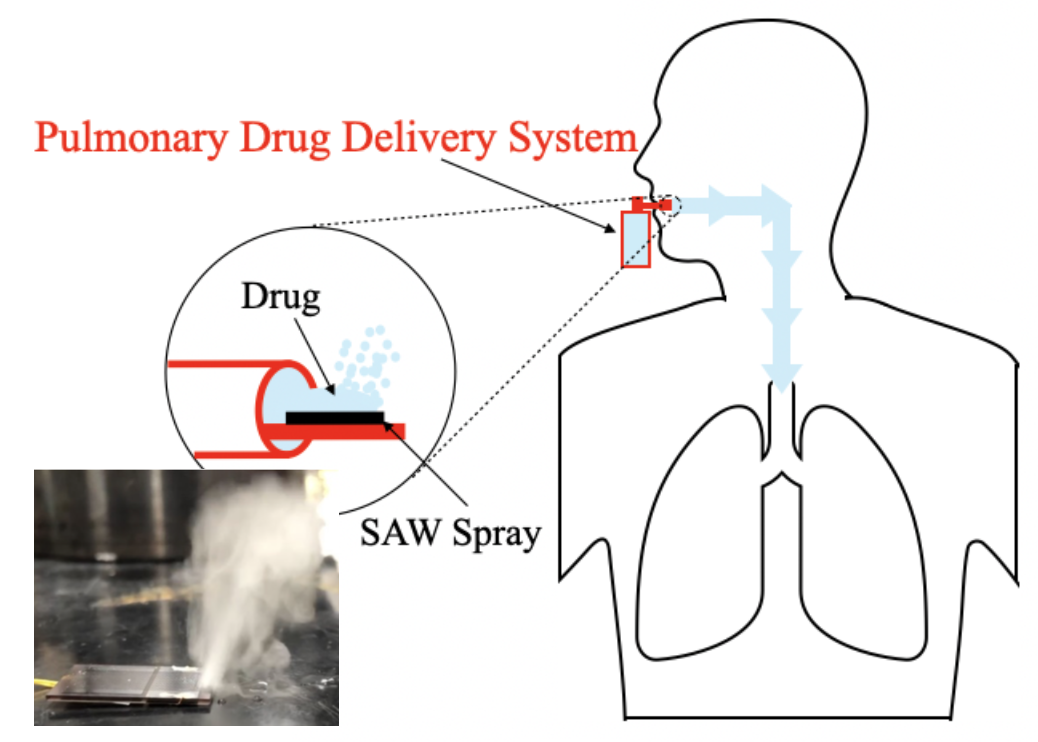
高周波数弾性表面波素子による無圧式ナノ粒子スプレー